
Sam Nie
Hello every one. This is Sam Nie, the CEO of LUPMOTORS. With 10 year's technical and manufacture experience in the field of 3-phase electric motor, I can provide you definitive guides in the knowledge of 3-phase industrial electric motors,which will help you a lot in selecting electric motors for your applications.

Efficiency

Precision
Adaptability
Synchronous speed
Slip

Impact of the Number of Poles on RPM

Key Factors Affecting Speed
-

1.Supply Frequency (f)
Increasing or decreasing the supply frequency alters the synchronous speed. This is the principle behind frequency control methods.
-
2.Number of Poles (P)
The more poles a motor has, the lower its synchronous speed. Changing the number of poles provides a practical way to control motor speed in multi-speed motors.

Speed Control Methods Derived from These Principles






Energy Savings
Click it for more contents

Cost Savings
Click it for more contents

Return on Investment (ROI)
Click it for more contents

Energy Savings
Click it for more contents
Cost Savings
Click it for more contents
Efficiency Gains
Click it for more contents

Synchronous Motor vs. Induction Motor: The Definitive Guide
“Discover the key differences between synchronous and induction motors. Learn about their structure, operation, advantages, and applications to make the right choice for your needs.”

AC vs. DC Electric Motors: What’s the Difference?
Discover the key differences between AC and DC motors. Learn their working principles, advantages, and real-world applications to choose the right motor for your needs.

10 Duty Cycles for Electric Motors that You Need to Know
Discover the 10 essential duty cycles for electric motors! Learn how each impacts performance, efficiency, and applications. Perfect for engineers & industries.

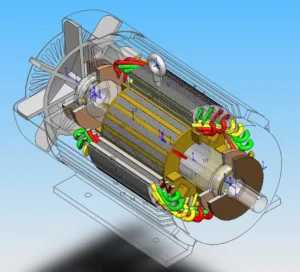
Stator vs. Rotor: Difference, Functions, Components & More
Discover the key differences between stator and rotor in electric motors. Learn their functions, components, applications, and innovations. Motor Stator vs. Rotor.
Speed Control of Three-Phase Induction Motor | 7 Methods
Discover effective methods for speed control of three-phase induction motors, including V/f control, pole changing, and rotor resistance control, to enhance efficiency and performance.
3-Phase AC Induction Motor | Working Principle, Definition & Types
Learn the working principle of 3-phase AC induction motors, their definition, structure, types, and real-world applications. A must-read for industrial insights!