
Sam Nie
Hello every one. This is Sam Nie, the CEO of LUPMOTORS. With 10 year's technical and manufacture experience in the field of 3-phase electric motor, I can provide you definitive guides in the knowledge of 3-phase industrial electric motors,which will help you a lot in selecting electric motors for your applications.

Performance

Efficiency

Longevity
-

Continuous Duty
This is like pulling a 24-hour shift without rest—tough, but efficient for certain tasks. The rated category of the motor should be marked after the rated output. If there is no rated category, it is considered to be the continuous duty rating.
-
Short-Time Duty
Think of working an hour and taking a long break. Motors cool down fully between cycles.
-
Intermittent Duty
A balanced “work-rest-work” routine that prevents fatigue—great for machines with predictable cycles.






P (Load)
The uppermost curve shows the load (P) applied to the motor, which remains constant throughout the operation. This steady-state load represents the motor's rated operating conditions.
PV (Electrical Loss)
Below the load curve, the electrical losses (PV) are displayed as a constant horizontal line. These losses remain steady during the motor's operation, contributing to heat generation.
θ (Temperature)
The bottom curve represents the motor’s temperature (θ) over time. Initially, the temperature rises as the motor generates heat, but eventually, it stabilizes when thermal equilibrium is achieved.
θmax (Maximum Temperature)
This horizontal dashed line indicates the maximum temperature (θmax) the motor reaches during continuous operation. At this point, the heat generated equals the heat dissipated.

t (Time)
The horizontal axis represents time (t). As time progresses, the temperature curve illustrates the motor’s transition from an initial state to a steady-state.


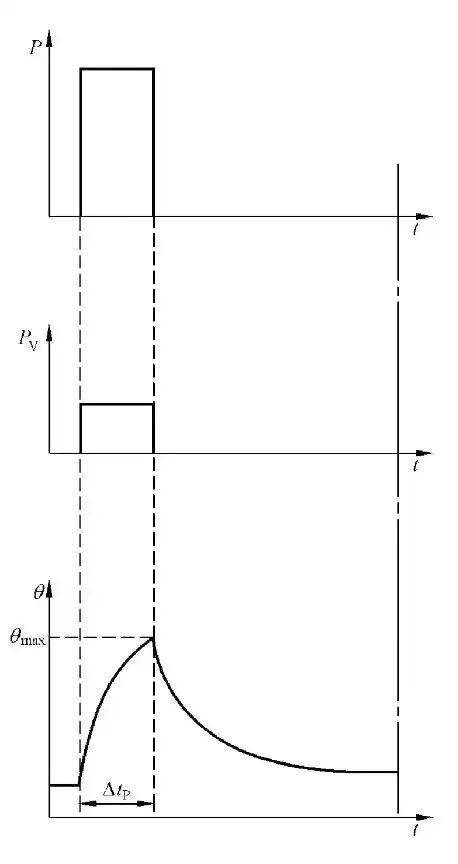
P (Load)
The P curve in the top graph shows the load applied to the motor. The motor runs at a constant load (Pi) for a specific time, as indicated by the horizontal segment of the curve.
PV (Electrical Loss)
Below the load curve, PV represents the electrical losses during operation. This value remains steady during the load phase, corresponding to the constant load applied to the motor.
θ (Temperature)
The θ curve in the bottom graph indicates the motor’s temperature during operation. Initially, the temperature rises due to the load applied.
θmax (Maximum Temperature)
This represents the maximum temperature reached during the load period (ΔtP). After the load period ends, the motor stops, and the temperature begins to decrease as the motor cools down.
t (Time)
The horizontal axis in all graphs represents time (t).
ΔtP
This is the time during which the motor operates under a constant load. Once ΔtP ends, the motor is turned off, entering a cooling phase with no load applied.


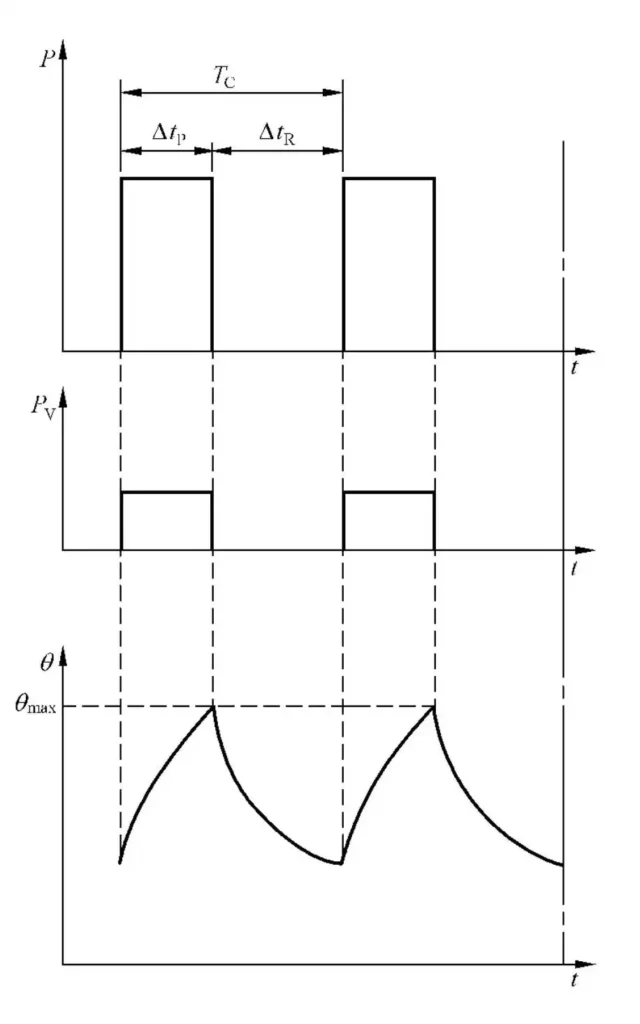
P (Load)
1.The P curve in the top graph represents the load applied to the motor. 2.The motor operates under a constant load (Pi) for a defined time during each cycle, followed by a no-load period.
PV (Electrical Loss)
PV, the electrical loss, corresponds to the motor's power consumption during operation. It appears as constant horizontal lines during the load period and drops to zero during the no-load rest phase.
θ (Temperature)
1.The θ curve in the bottom graph shows the motor’s temperature over time. 2.During the load phase, the temperature rises but does not reach the maximum permissible 3.During the rest phase, the temperature decreases as the motor cools down before the next cycle begins.

TC (Load Cycle Duration)
1.TC represents the total cycle time, including both the load period (ΔtP) and the rest period (ΔtR). 2.ΔtP: The time during which the motor operates under a constant load. 3.ΔtR: The time allocated for rest or no-load running, allowing the motor to partially cool down.
θmax (Maximum Temperature)
The highest temperature achieved during the load phase of each cycle. The motor’s temperature remains below θmax due to the cooling effect during the rest phase.


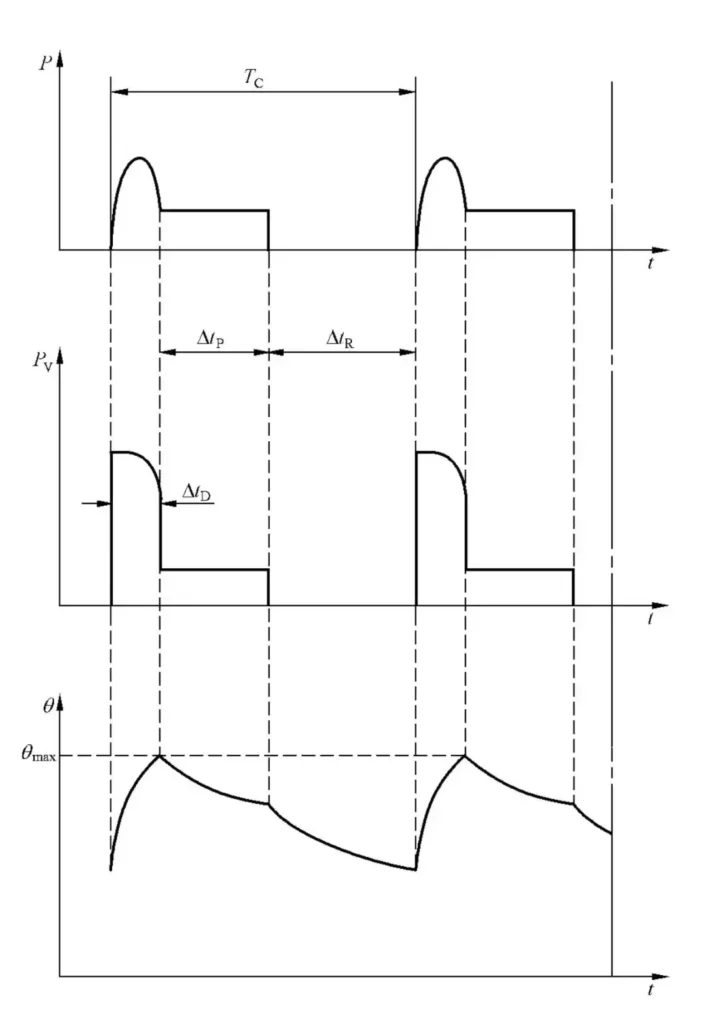
P (Load)
1.The P curve at the top represents the motor's load over time. 2.During each cycle, the motor undergoes a sharp increase in load at the start (ΔtD) and then operates at a constant load (ΔtP).
θ (Temperature)
TC (Load Cycle Duration)
TC represents the total duration of one load cycle, including the starting phase (ΔtD), constant load operation phase (ΔtP), and resting phase (ΔtR).


P (Load)
1.The P curve at the top shows the load applied to the motor during the cycle. 2.The load increases sharply during the starting phase (ΔtD), remains constant during the operational phase (ΔtP), and then drops during the braking phase (ΔtF).
θ (Temperature)
TC (Load Cycle Duration)
TC represents the total time for one cycle, including starting (ΔtD), constant load operation (ΔtP), braking (ΔtF), and resting (ΔtR) phases.
PV (Electrical Loss)
1.PV, shown in the middle graph, represents the electrical losses during operation. 2.Losses are highest during the starting phase (ΔtD) and the braking phase (ΔtF). During constant load operation (ΔtP), losses stabilize at a lower, steady level. In the resting phase (ΔtR), losses drop to zero.


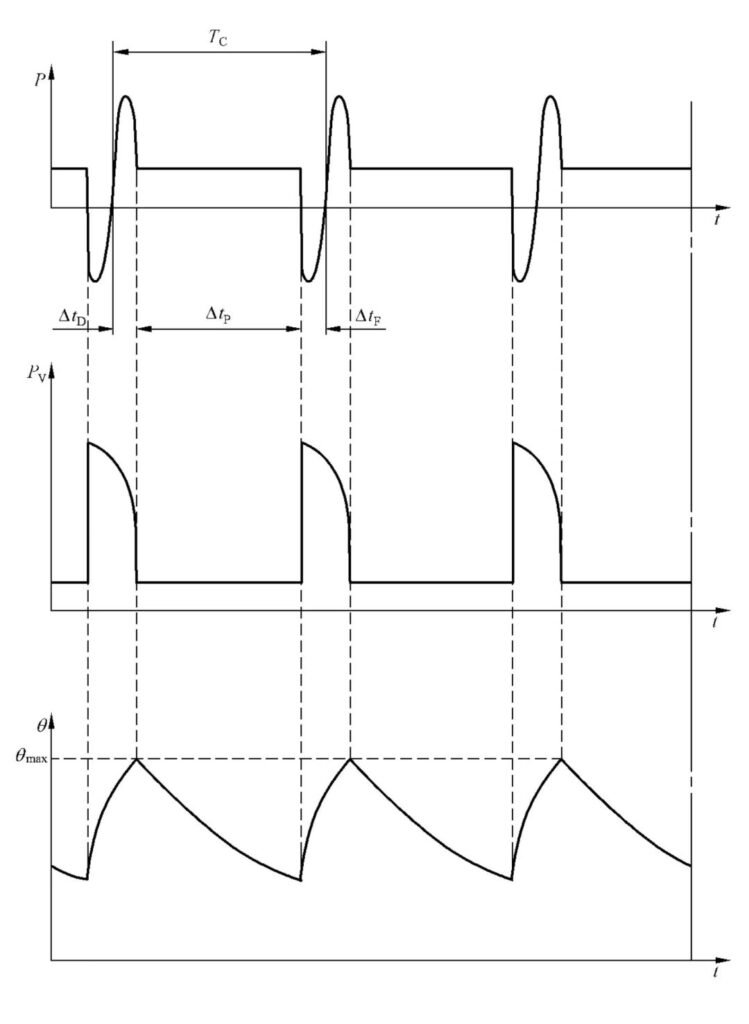
P (Load)
PV (Electrical Loss)
θ (Temperature)
TC (Load Cycle Duration)
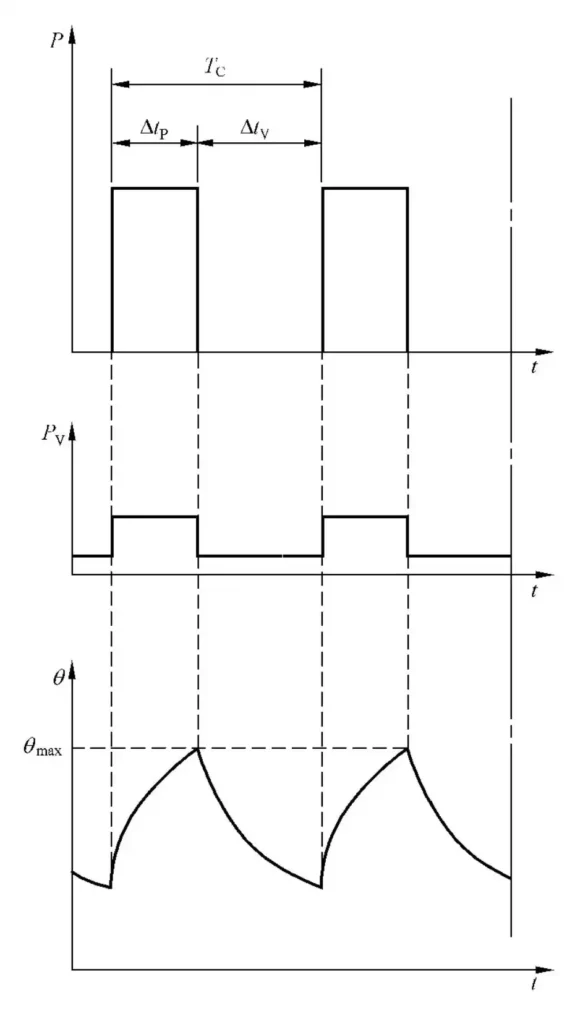
TC represents the total duration of one cycle, including both the load phase (ΔtP) and the no-load phase (ΔtV).


P (Load)
PV (Electrical Loss)
θ (Temperature)
TC (Load Cycle Duration)
TC is the total duration of one cycle, including starting (ΔtD), constant load operation (ΔtP), and braking (ΔtF).


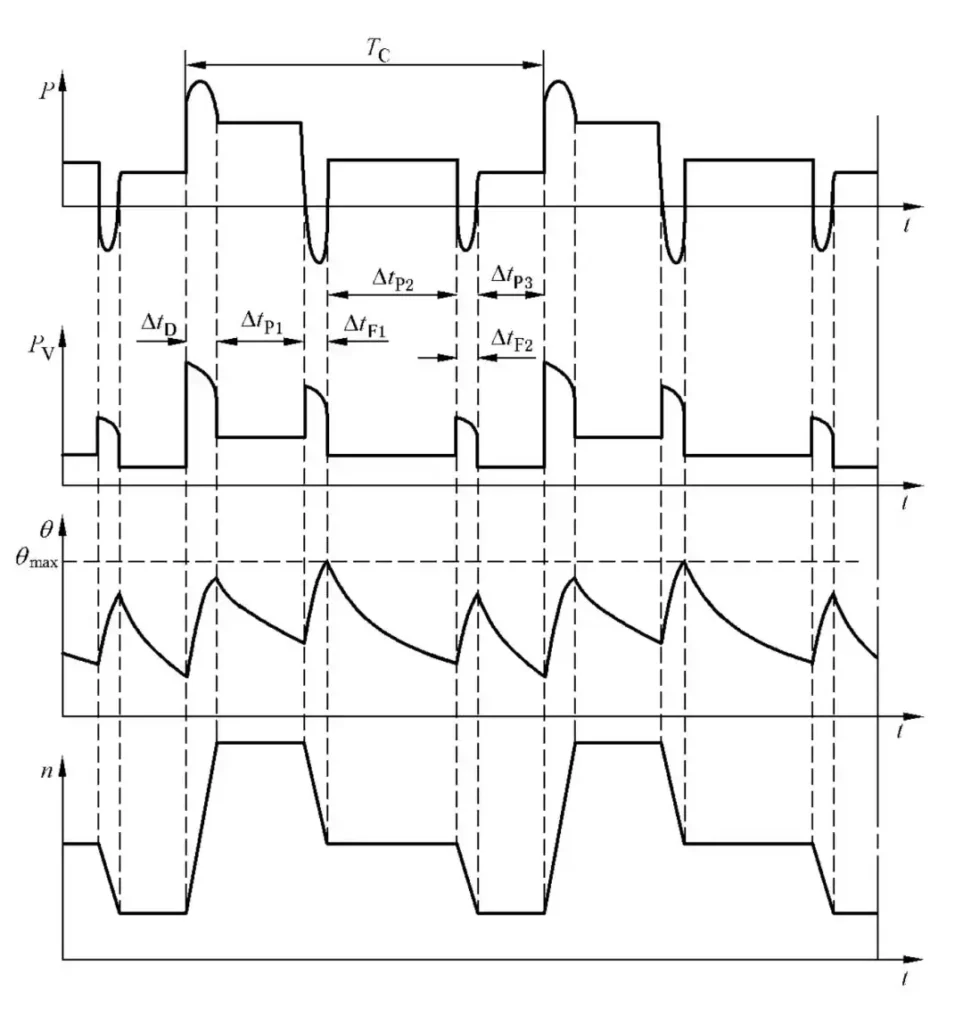
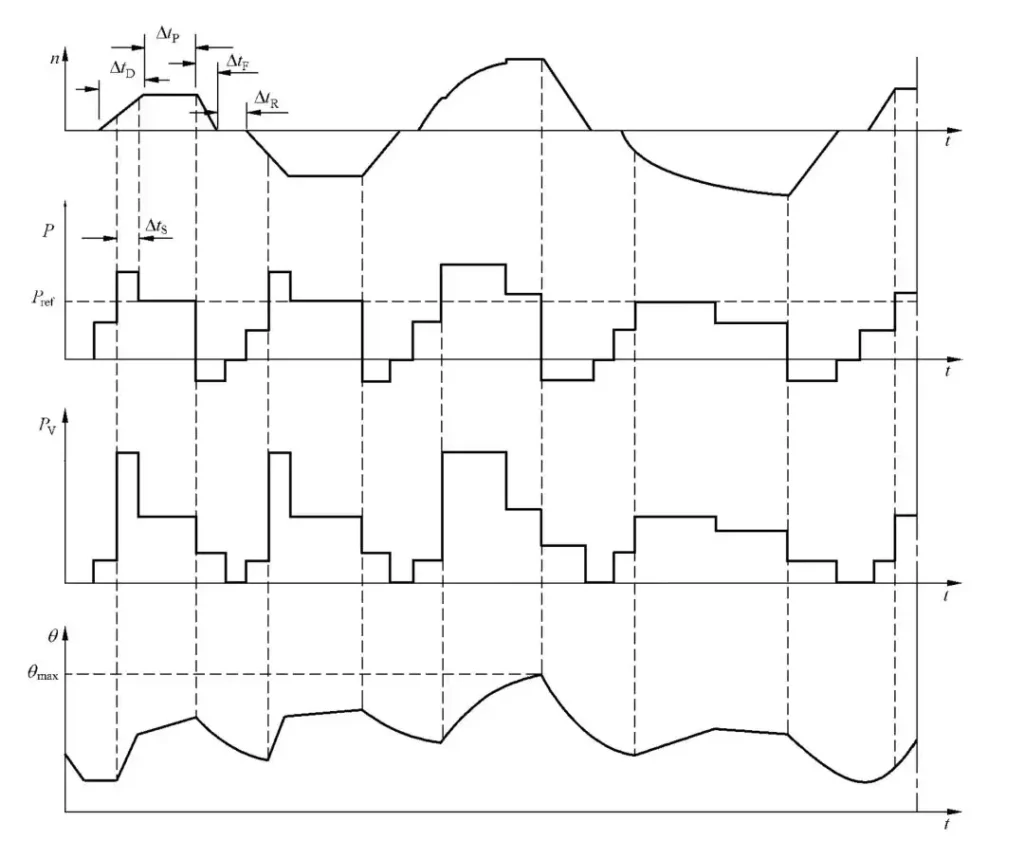
P (Load)
PV (Electrical Loss)
θ (Temperature)
n (Speed)
TC (Load Cycle Duration)
TC represents the total duration of one cycle, encompassing all the load phases (ΔtP1, ΔtP2, and ΔtP3).


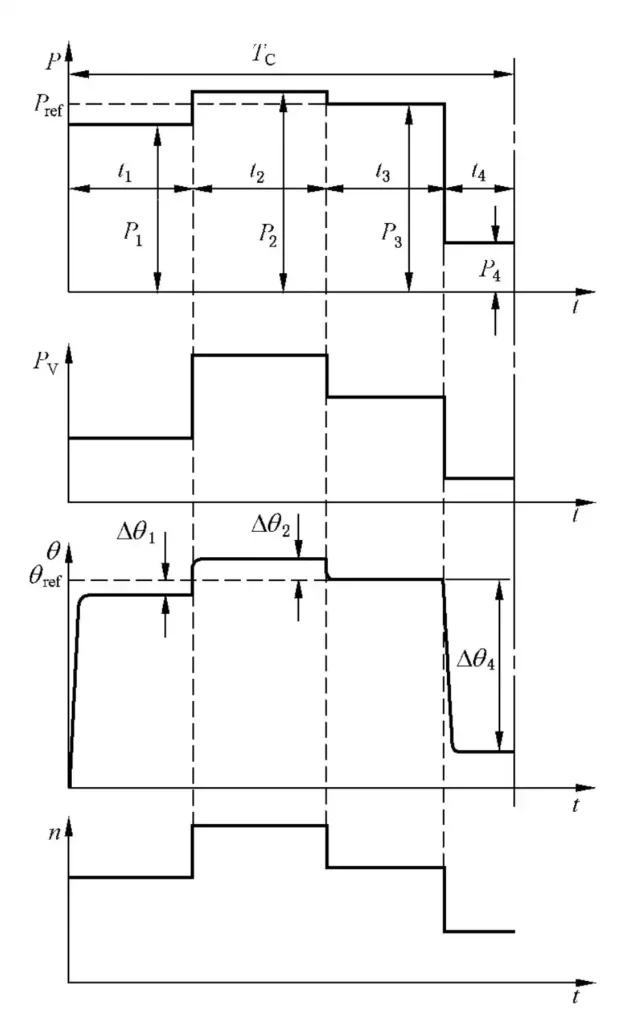
n (Speed)
P (Load)
PV (Electrical Loss)
θ (Temperature)
TC (Load Cycle Duration)
TC represents the total cycle time. However, unlike other duty types, TC in S9 does not follow a fixed pattern due to the non-periodic nature of load and speed variations.


P (Load)
θ (Temperature)
n (Speed)
TC (Load Cycle Duration)
TC is the total duration of one cycle, including all discrete load levels and transitions.